Design, prototyping, and functional analysis of a self-regenerating modular robot
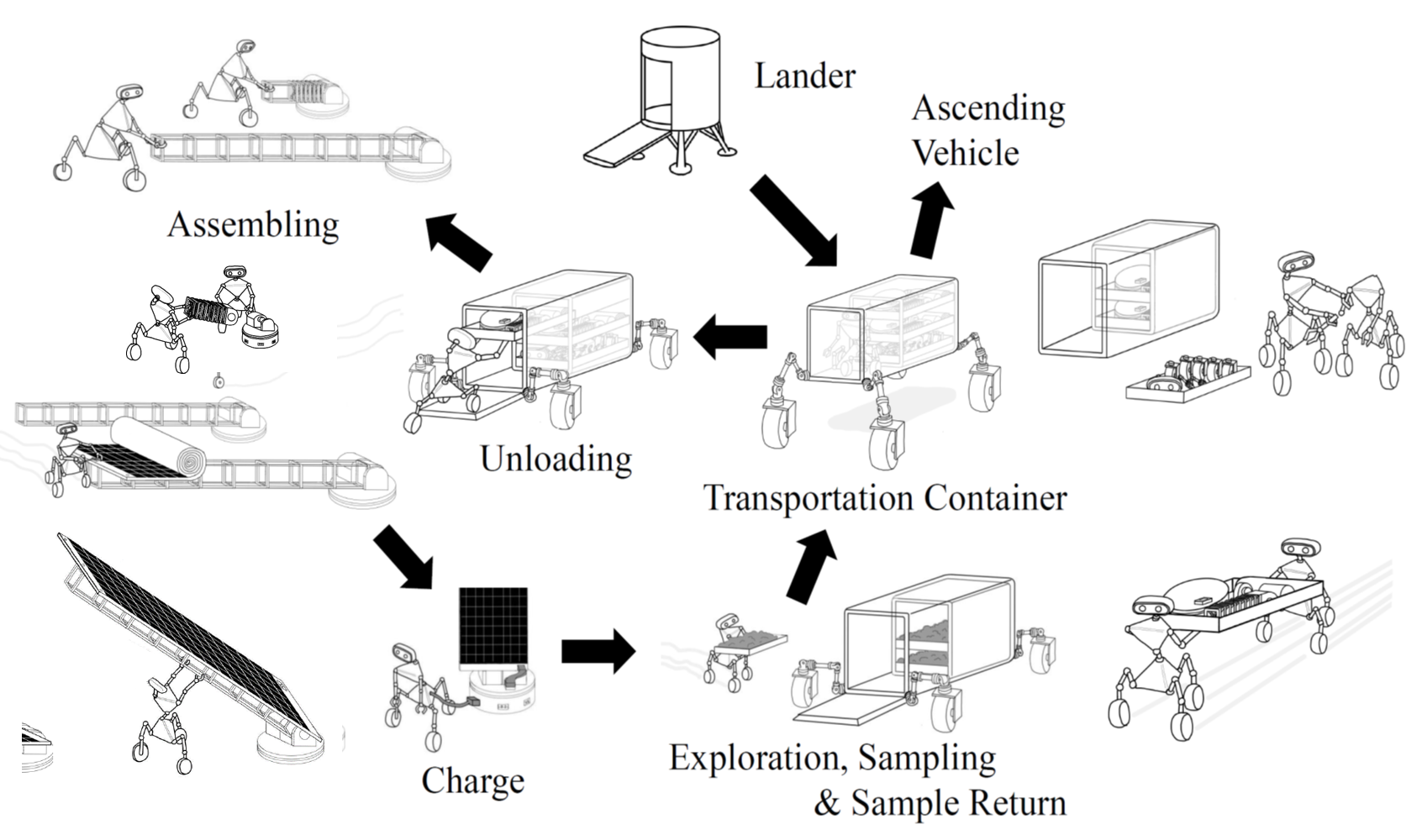
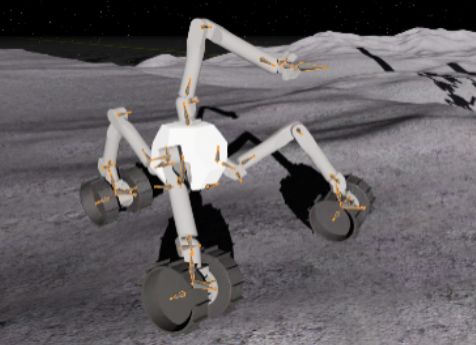
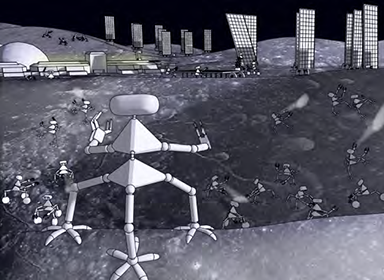
Summaryn this research theme, we designed, fabricated, and analyzed the functions of a modular robot that can adaptively change its form and perform “transformable” tasks, and developed the modular robot system that forms the core of this project. The robot module configuration method, the form of the robot created by combining modules, and the robot behavior and functions (tasks) in each form (design) were each accumulated as a database (repository) and utilized for the simultaneous optimization of structure and controller based on hierarchical reinforcement learning in R&D item 2. The database will be used for simultaneous optimization of structures and controllers based on hierarchical reinforcement learning in R&D item 2.