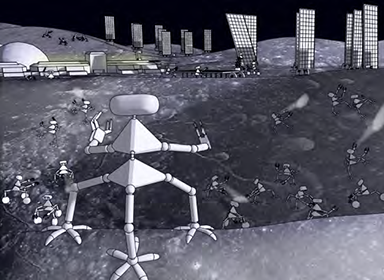
複数ロボットによる拠点構築の統合制御
概要
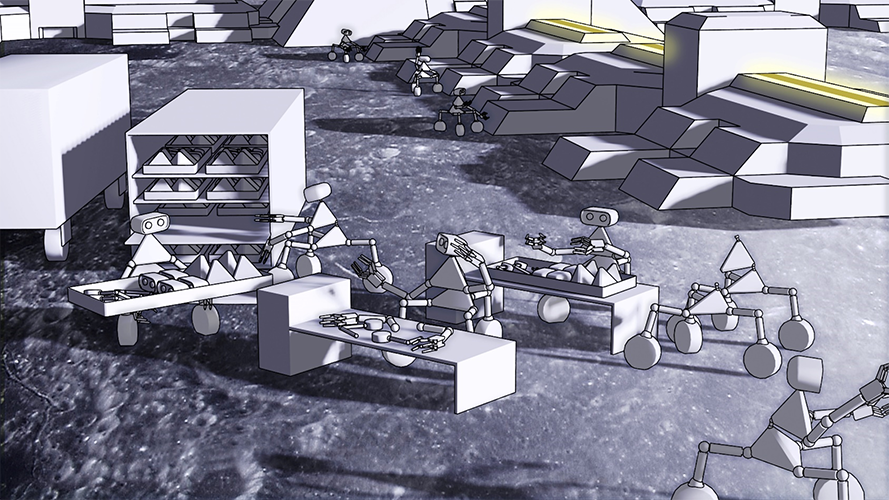
動作検証用ロボットマニピュレータシステムをベースとして、各アームの能動自由度を制限したり、エンドエファクタにバリエーションを持たせることにより複数の異構造ロボットが協調作業を行う場面を作り出し、動力学シミュレ-ションとハードウエア実験をシームレスに連動させる研究環境(Sim2Real) を構築し、以下の3項目について検証を行いました。

動作検証用ロボットマニピュレータシステムをベースとして、各アームの能動自由度を制限したり、エンドエファクタにバリエーションを持たせることにより複数の異構造ロボットが協調作業を行う場面を作り出し、動力学シミュレ-ションとハードウエア実験をシームレスに連動させる研究環境(Sim2Real) を構築し、以下の3項目について検証を行いました。
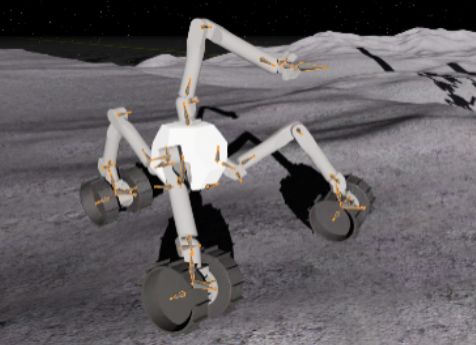
1.多肢型モジュラーロボットの検証モデルを構築し、5種類以上の異なる構造・形態に対して、それぞれに対する制御モデルの構築。
2.ある特定の構造・形態におけるロボットタスクのために構築したAI制御システムにおいて、既にリポジトリに蓄積された学習成果を活用することにより、50%少ない試行回数によって同じタスクの遂行が可能となることを検証。
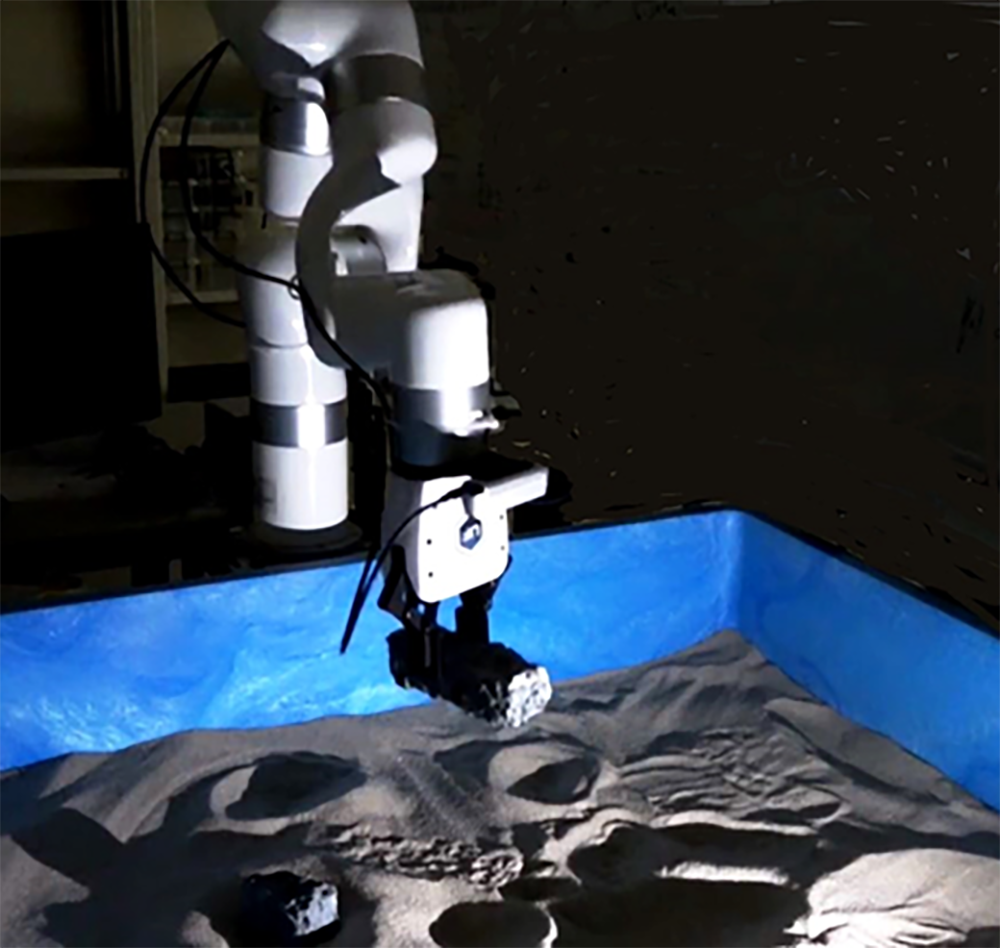
3.ロボットアームを用いて、模擬砂礫地(粒径1mm~50cm程度の岩石がランダムに分布)において、表面および表面下10 cmの範囲から、任意の砂礫サンプルを採集可能なことを実証。