階層型強化学習による分散型AIの実現
概要
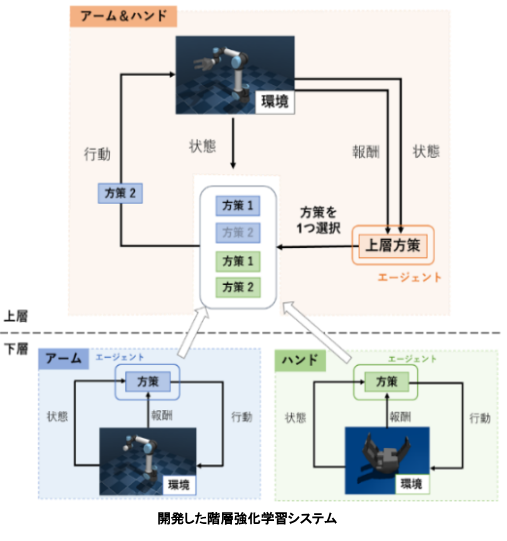
本テーマでは、「変幻自在」なモジュラー・マルチエージェントなロボットシステムに組み込まれ、自己成長するAIシステムの実現を目指します。ロボットの動作を生成し制御するためのAIとして深層強化学習が研究され成果をあげてきていますが、現時点での研究成果は、単一身体のロボットや、個別のタスク学習での実装が中心です。組み換え可能な再構成型ロボット、および異種形態のロボット群に適用するためには、学習成果をPlug and Play (転用、再利用、再構築)可能とする手法の確立が必要であり、「階層型強化学習」を発展させることが有力なアプローチとなります。この手法を活用する本研究開発課題においては、特に組立てタスクを用いて開発されるAI技術を評価します。