自己再生型モジュラーロボットの設計・試作・機能解析
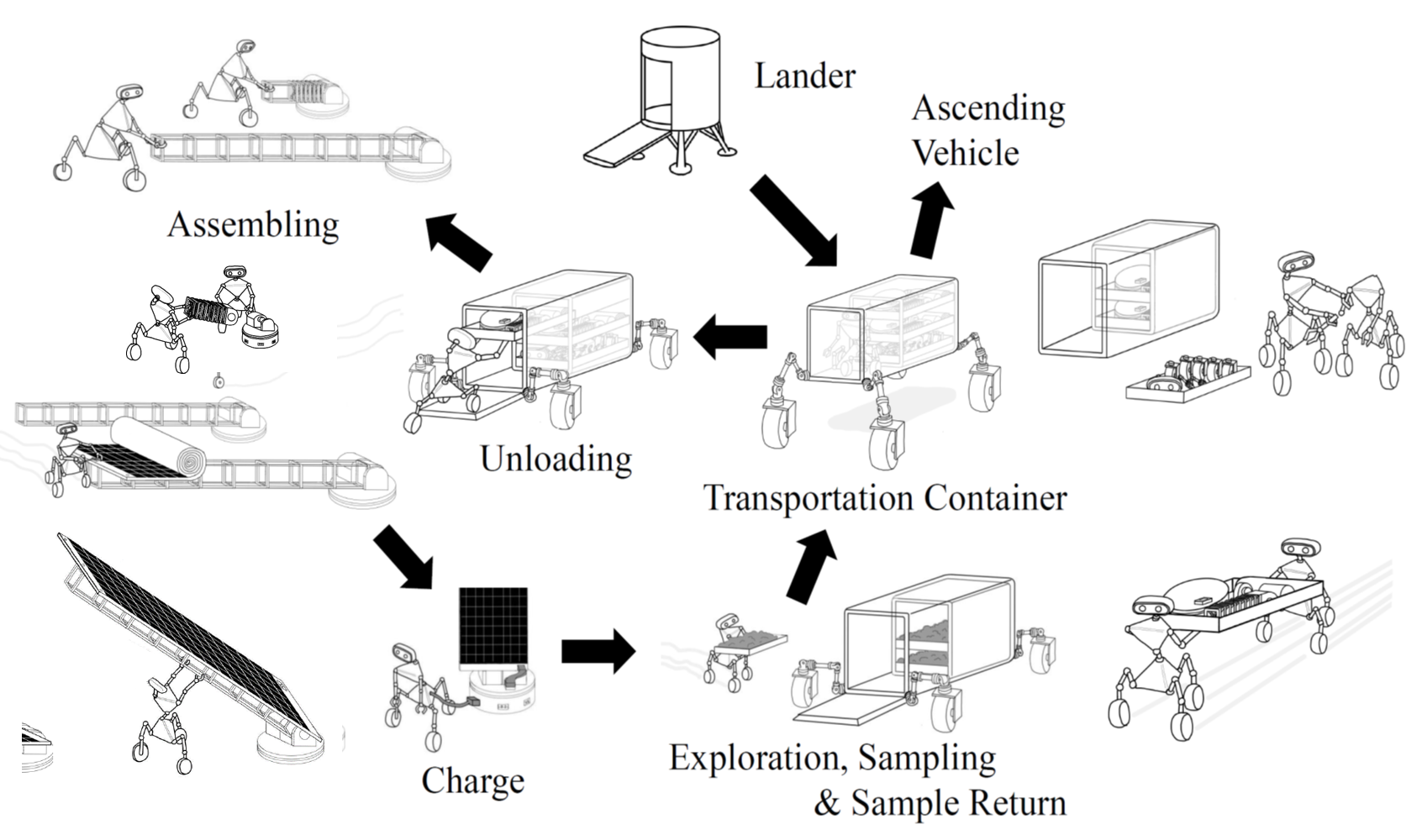
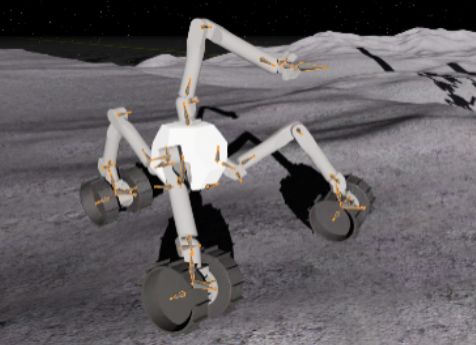
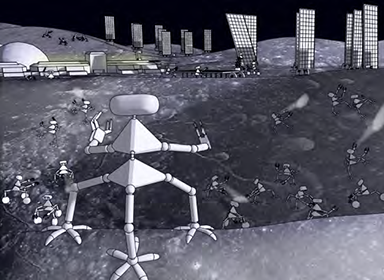
概要本研究テーマにおいて、適応的に形態を変えて「変幻自在」にタスクを行うことができるモジュラーロボットの設計、製作・機能解析を行い、本プロジェクトの中核をなすモジュラーロボットシステムの開発を進めました。ロボットモジュールの構成法、モジュールの組み合わせにより生み出されるロボットの形態、それぞれの形態(デザイン)におけるロボットの動作や機能(タスク)については、それぞれデータベース(レポジトリ)として蓄積し、研究開発項目2における階層型強化学習に基づく構造と制御器の同時最適化に活用します。