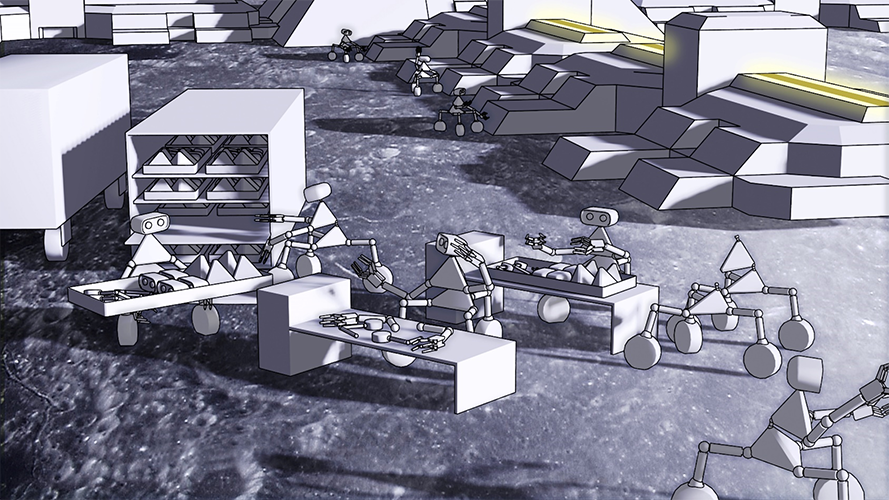
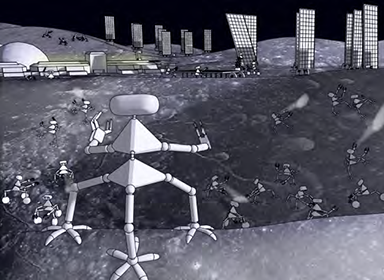
Integrated control of base construction with multiple robots
Summary
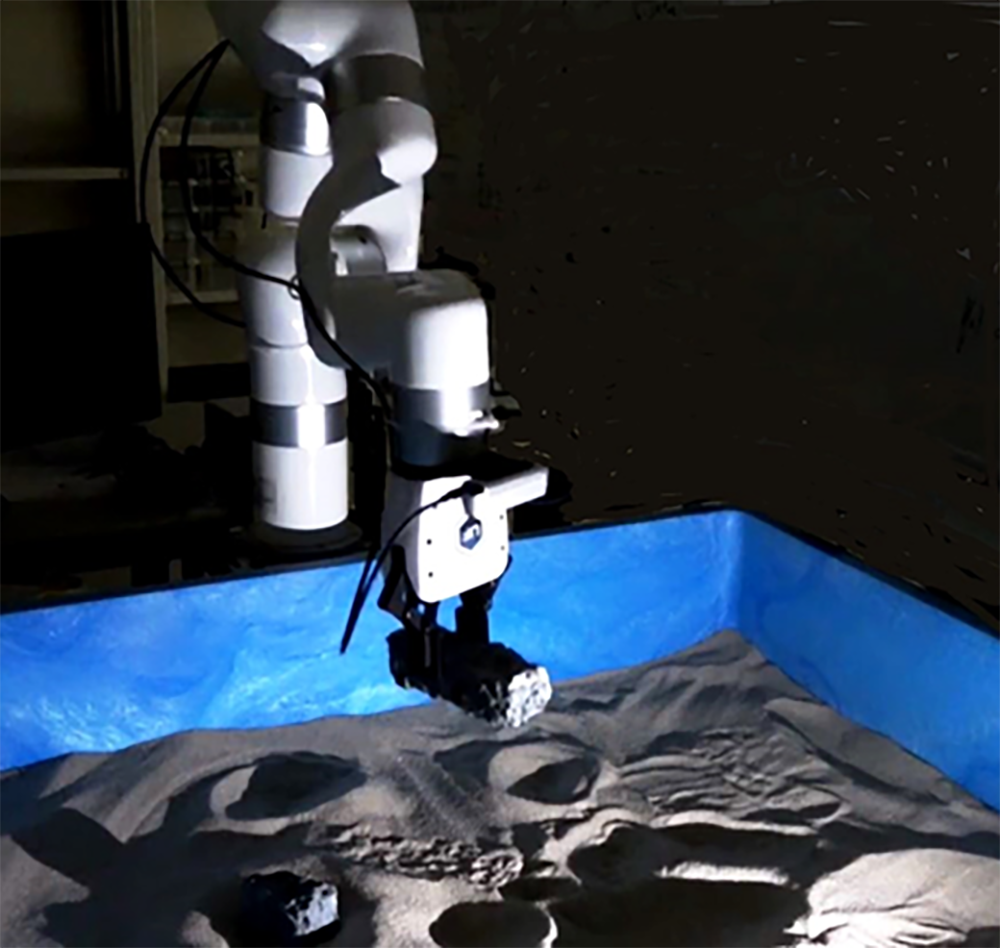
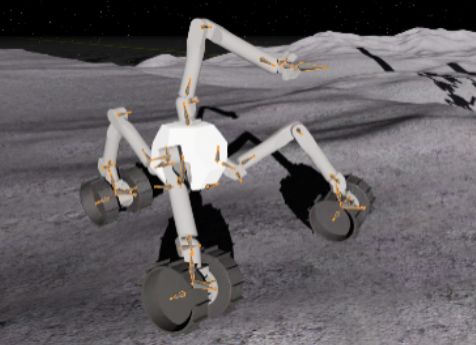
Based on a robot manipulator system for motion verification, we created a situation in which multiple robots with different structures cooperate by restricting the active degrees of freedom of each arm and by adding variations to the end-effectors. A research environment (Sim2Real) was constructed to seamlessly link dynamics simulations and hardware experiments, and the following three items were verified.