ABOUT OUR
PROJECT
月面探査/拠点構築のための自己再生型AIロボット
ムーンショット型研究開発プロジェクト目標3
「2050年までに、AIとロボットの共進化により、自ら学習・行動し人と共生するロボットを実現」
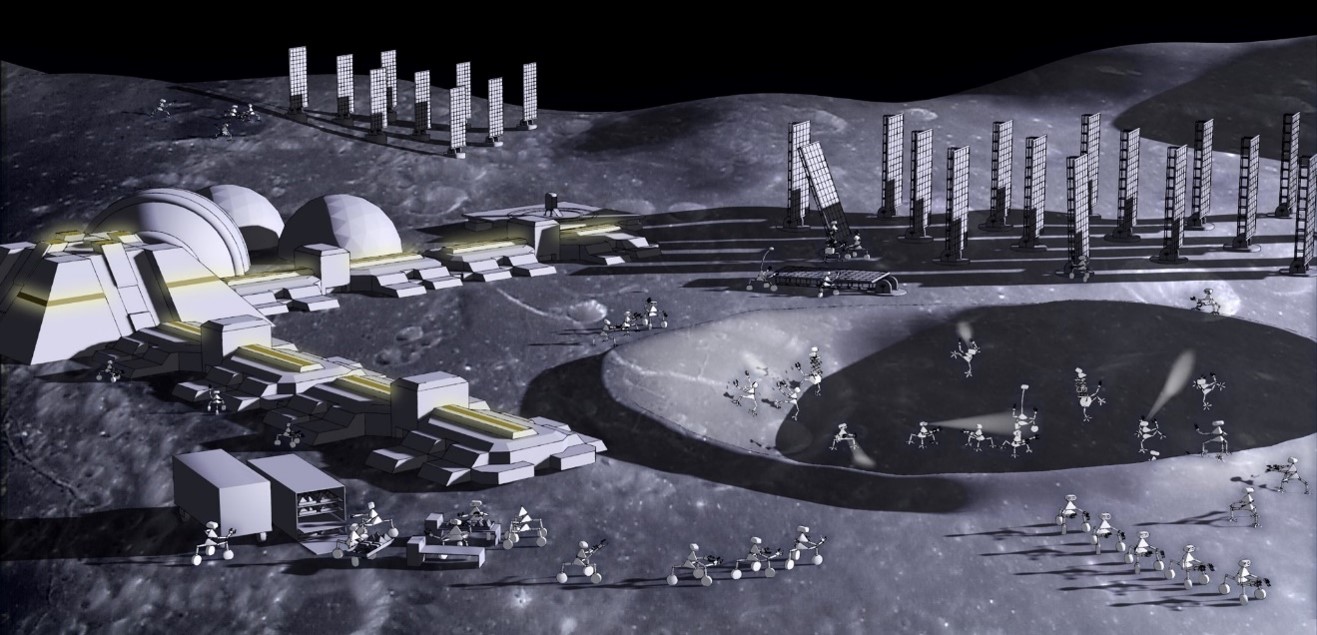
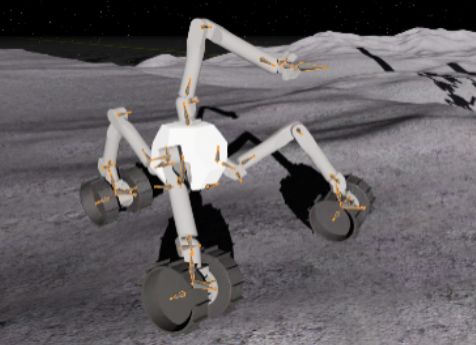
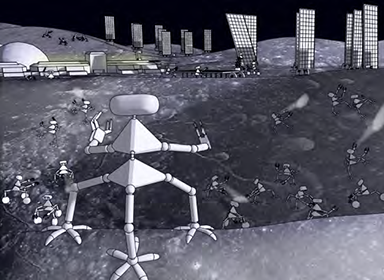
本研究開発プロジェクトでは、2050年代に月面での持続的な有人活動を可能にするためのAIロボット技術の開発を行います。 2020年代後半には人類が再び月に向かう時代が始まろうとしており、2030~2040年代には本プロジェクトで開発するAIロボットシステムにより、有人の長期観測拠点が構築され、2050年代にはより多くの人々が月を訪ねて、生活圏・経済圏を構築する時代となることを目指します。月面という人が活動することが難しい環境において未到探査および拠点構築を行う主要な担い手として、本プロジェクトでは、複数の異種形態のロボット群からなる自己修復/自己成長型AIロボットシステムを提案し、その実現に向けた研究開発を行います。 月面への物資輸送の機会は限られ大きなコストがかかることから、月面に持ち込んだ資材を有効活用し、状況に応じて組み換えを行って形態を変化させ、また必要に応じて月面で得られる資源を用いてパーツの補修や新規追加を行うことを可能とし、様々な形態や状況に対応する適応的なAIシステム組み込むことにより、「変幻自在」なAIロボットシステムを実現することを考えます。 このような革新的なロボット技術の実現により、2040年~2050年代には、ロボットが月面上に拠点を構築し、人が月面上で創造的な活動を行うというムーンショット目標を達成し、さらにその活動は月面に限らず、月以外の天体へと拡がっていくことを目指します。開発された技術は、地球上の自然災害等にも応用できます。
2050年におけるAIロボットによる月面活動拠点のイメージ